From mining and waste handling in Sweden to sugar cane harvesting in Brazil, Volvo Trucks is exploring the different possibilities created by automation. Whether it’s a self-driving refuse truck or truck platooning, in every concept developed automation is largely made possible by key enablers like Volvo Dynamic Steering, Collison Warning with Emergency Brake, Adaptive Cruise Control, I-Shift and sensors. Some of these features are available today as standard in new Volvo Trucks models. While they were not developed with automation in mind, each offers capabilities that make automation possible. In addition to the enablers, all that is required are sensors (such as radar, lidar, camera and antenna) and new software, and a complete automation solution becomes possible.
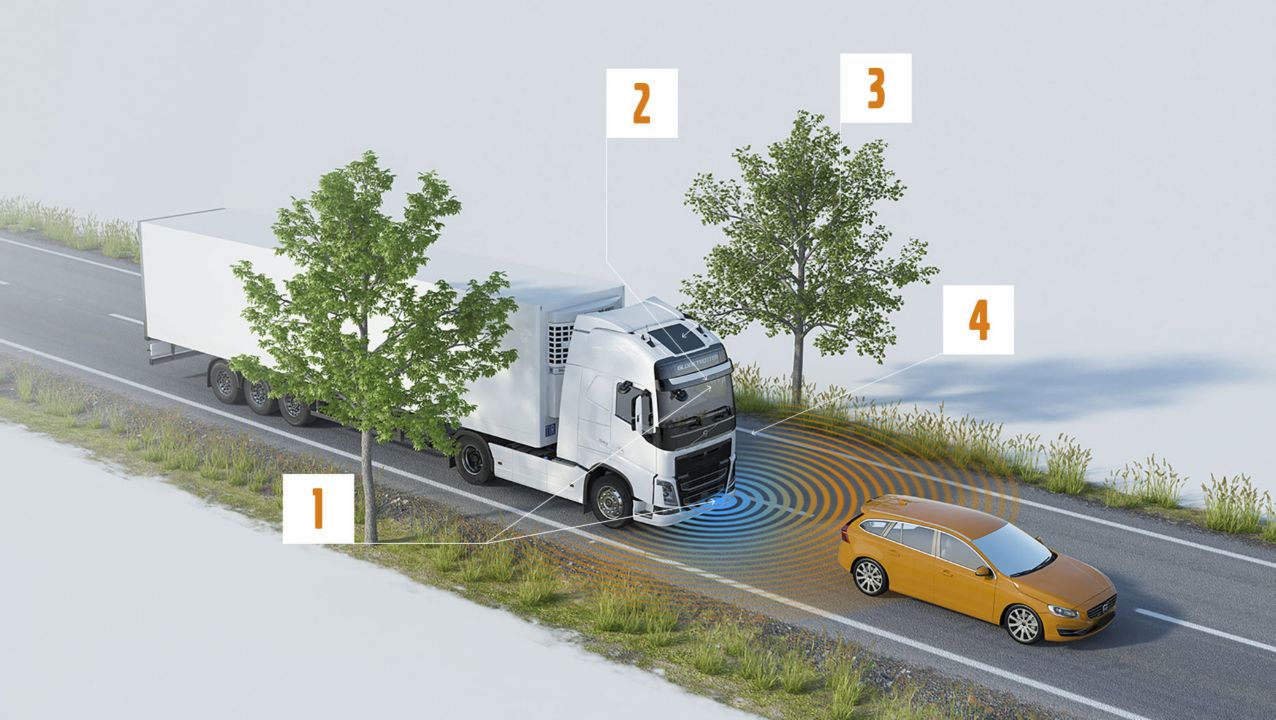
1. Control unit
Software is key to ensuring all these components work together. All the information from the truck’s various sensors and antenna is collected in the control unit, where it is processed and analysed. Instructions are then communicated with the truck’s different automated components.
2. Adaptive Cruise Control
Adaptive Cruise Control (ACC) maintains a set speed, which is automatically adjusted to the vehicle ahead. It works through a radar that monitors traffic in front of the vehicle. The exact same system is also used in platooning, to ensure each vehicle maintains the right speed and a safe distance to the truck in front.
3. Antenna
For vehicle-to-vehicle communication (used in platooning), vehicle-to-infrastructure communication and GPS mapping (used in the autonomous sugar harvest truck), an antenna is needed for receiving and transmitting information.
4. Collision Warning with Emergency Brake
Collision Warning with Emergency Brake will warn a driver of any potential collisions with vehicles ahead, and will automatically brake if a collision is imminent. A camera and radar are used to identify objects ahead, and measure the speed and distance. The same system is used in Volvo Trucks’ automated vehicles, to ensure there are no collisions.
5. Sensors
For any automated vehicle, sensors are needed for monitoring the truck’s surroundings for both stationary and moving objects. The number of sensors and their location is dependent on the truck’s application, but in all instances their purpose is to provide input into the main processor, to create a better understanding of the vehicle’s situation.
6. Volvo Dynamic Steering
VDS’ main purpose is to relieve the strain on the driver, by minimising the physical effort needed to steer a truck. It achieves this through an electrical motor mounted on top of the steering gear. The same VDS technology is also used to automate the steering in self-driving trucks.
7. I-Shift
Volvo Trucks’ leading automated transmission ensures the truck is always operating in the optimal gear. After evaluating important factors such as the vehicle’s speed and the gradient of the road, it quickly calculates and selects the best gear for efficient driving. In automated vehicles, the I-Shift continues to serve this vital function.